Nachführung der parallaktischen Teleskopmontierung GP-DX
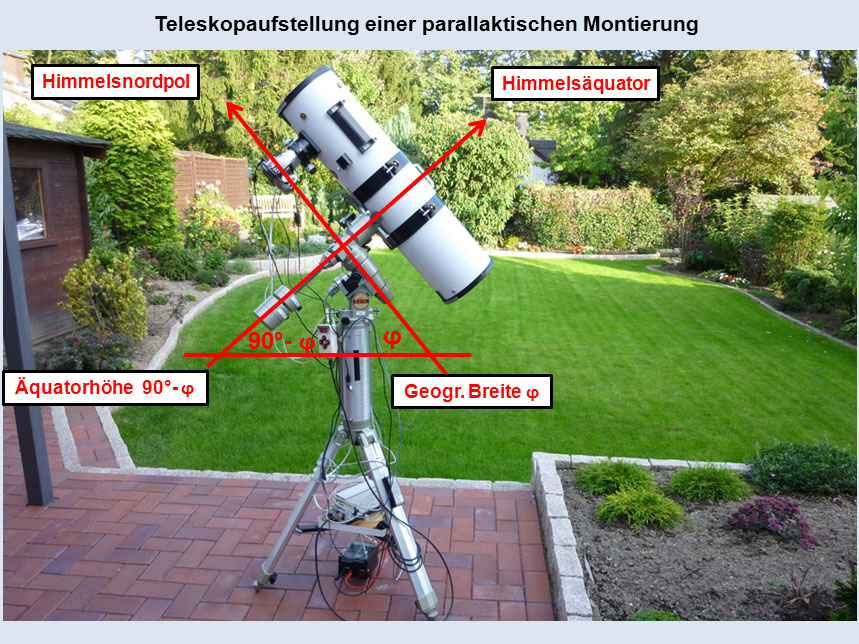
1. Teleskopaufstellung:
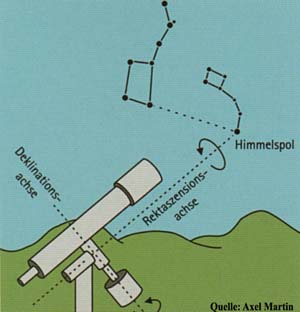
Parallaktische Montierung
Die Montierung ist mit seinem stabilen Polblock das Bindeglied zwischen Stativ und Teleskop.
Um ein Teleskop auf alle Punkte des Himmels
richten zu können, muß es um zwei zueinander senkrechte
Achsen drehbar sein. Der Optiker und Instrumentenbauer Fraunhofer (1787 - 1826) entwickelte die sogenannte "Deutsche Montierung". Bei
dieser parallaktischen Montierung liegt eine
Drehachse, Stundenachse oder Rektaszensionsachse, parallel zu
Erdachse und
weist zum Himmelspol. Bei der Drehung des Teleskopes um seine
Stundenachse bleibt ein einmal eingestellter Himmelskörper trotz
seiner scheinbar täglichen Bewegung am Himmel in der Mitte des
Gesichtsfeldes. Senkrecht zur
Stundenachse liegt die Deklinationsachse und weist zur Ebene des
Himmelsäquators. Durch eine Drehung um die Deklinationsachse
können Objekte verschiedener Deklination eingestellt werden. Damit
ein Objekt möglichst lange in der Mitte des Bildfeldes bleibt, ist
eine genaue Ausrichtung der Stundenachse auf den Himmelspol
notwendig.

Poljustierung einer parallaktischen Montierung
Der Himmelsnordpol liegt in einer Winkelhöhe über
dem Horizont, die der geograghischen Breite des Beobachtungsortes
entspricht. Folglich wird die Polhöhe am Polblock der
Montierung z.B. in Düsseldorf auf 51,2° eingestellt. Da
der Himmelsnordpol nicht direkt sichtbar ist, muß der ca.
1°
entfernte Polarstern als Orientierung dienen. Der Polarstern dreht sich
wie alle Sterne in 24 Stunden, allerdings im geringen Abstand, einmal
um den Himmelsnordpol. Bei der GP-DX Montierung der Fa. Vixen ist in dem
Rohr der Stundenachse ein kleines Fernrohr als Polsucher eingebaut.
Dieser Polsucher hat Einstellscheiben für Datum,
Uhrzeit und eine spezielle Skalenplatte zur Justierung der aktuellen Position des
Polarsternes. Nach einer genauen Poljustierung mit aktuellen Datum und Uhrzeit genügt es die Stundenachse
des Teleskopes gleichmäßig analog zur Erddrehung
nachzuführen. Eine ungenaue Ausrichtung einer parallaktischen
Montierung erkennt man an einer langsamen Drift der eingestellten
Objekte in Deklination.
2. Teleskopnachführung:
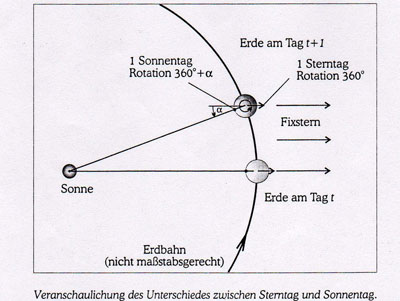
Sterntag und Sonnentag
Die Nachführung eines Teleskopes dient nur einem Zweck:
Ausgleich
der Erddrehung bei der Beobachtung astronomischer Objekte.
Zur Erläuterung:
Die Erde dreht sich im Laufe eines Jahres 365 mal um sich selbst und zusätzlich einmal um die Sonne, also 366 mal gegenüber
dem festen Sternhimmel.
Wenn man die Nachführgeschwindigkeit
des Teleskopes an der Dauer eines mittleren Sonnentages 24h (unser Kalendertag) einstellt, wird das Himmelsobjekt nicht im
Gesichtsfeld bleiben. Im Laufe eines Tages legt die rotierende Erde auch einen beträchtigen Teil
ihres Umlaufs um die Sonne zurück. Daher muß sich die
Erde gegenüber der Sonne um 1/365 Umdrehung (ca. 1°)
weiter drehen als gegenüber dem festen Sternhimmel (Fixsterne).
Unser "Sonnentag" mit 24h ist somit ca. 4 Minuten länger als
der "Sterntag" mit 23h 56min 4sec.
Deshalb wandert auch der feste Sternhimmel jeden Tag um ca 1° von
Ost
nach West weiter und wir erleben z.B. Winter- und Sommersternbilder.
Wir alle sind Sonnenkinder und deshalb liegt unserer bürgerlichen
Zeitrechnung der Sonnentag mit 24h zu Grunde - einfach
ausgedrückt: Der Zeitraum von Mittag zu Mittag. Die
Nachführung eines Teleskopes muß dagegen auf die
Sterngeschwindigkeit eingestellt werden mit 23h 56min 4sec.
Sonnentag - 24h x 60min x 60sec = 86400sec
Sterntag - 23h 56min
4sec = 86164sec

Teleskopantrieb mit Schneckenradgetriebe
Der Antrieb der beiden
Drehachsen RA und DE erfolgt jeweils über ein
Schneckenradgetriebe mit angeflanschtem
Schrittmotor einschließlich einem Vorgetriebe. Die beiden
Schneckenräder haben einen Außendurchmesser von 74mm, haben
144 Zähne und bestehen aus Messing. Die beiden eingängigen
Schnecken haben einen Außendurchmesser von 11mm und bestehen
ebenfalls aus Messing. Bei einer Umdrehung der Schnecke dreht sich das
Schneckenrad um einen Zahn weiter. Die Untersetzung des Vorgetriebes von 10:1 und die Untersetzung des Schneckenradgetriebes von 144:1 ergibt eine Gesamtuntersetzung von 1440:1.
Schrittmotor für den Antrieb des Schneckenradgetriebes
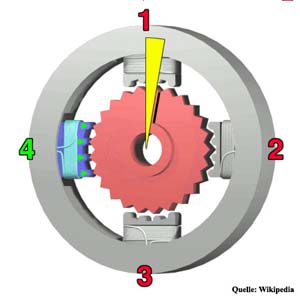
Bei einem Schrittmotor wird die Rotorwelle durch ein schrittweise
rotierendes elektromagnetisches Feld der Statorspule um einen festen
Winkel gedreht. Er folgt exakt dem außen angelegten Feld und kann
ohne Sensoren zur Positionsrückmeldung (z.B. Encoder) genau
betrieben werden. Die Drehbewegung entsteht durch gezieltes Ein-
und Ausschalten einzelner Wicklungen. Werden die Strompulse in
ausreichend schneller zeitlichen Abfolge erzeugt, ergibt sich eine
scheinbar kontinuierliche Drehbewegung der Motorachse. Um die Position
des Rotors zu bestimmen, genügt es die Schritte zu zählen und
mit dem Schrittwinkel zu multiplizieren. Dabei gibt der Schrittwinkel
an, um wieviel Grad sich die Achse bei einem Vollschritt bewegt. Der
Schrittwinkel beträgt z.B. 1,8°, wobei dann für eine
volle 360° Umdrehung 200 Vollschritte notwendig werden. Für einen besonders homogenen Verlauf werden Schrittmotoren mit einem gleichförmigen Drehfeld angesteuert.
Berechnung der Getriebeuntersetzung
Die Nachführgeschwindigkeit der Motorsteuerung ist auf die Rotationsdauer der Erde (Sterntag) 23h 56min 4sec = 86164sec voreingestellt.
Für eine Umdrehung des Schneckenrades muß entspr. der
Getriebe-Untersetzungen der Motor 200x10x144 = 288000 Schritte
durchführen.
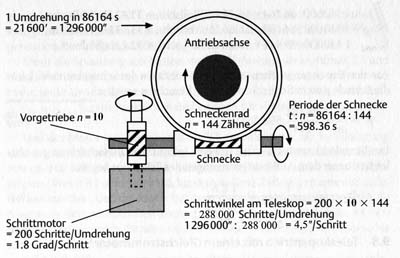
1 Umdrehung im
Winkelmaß entspricht
360°
21600'
1296000"
1 Umdrehung für 1 Sterntag entspricht
23h56min
1436min
86164sec
Eine Umdrehung des Schneckenrades entspricht 1 Umdrehung des Telekops gleich 1Sterntag.
288000 Schritte : 86164 sec = 3,3425 Hz pro Vollschritt oder 6,685 Hz pro Halbschritt
Das ist die Taktfrequenz, mit der der Motor angesteuert werden muß.
Der Lauf des Schrittmotors ist nicht kontinuierlich, sondern erfolgt
ruckartig.
Es ist wichtig zu wissen, wie groß der
Schrittwinkel der Motorwelle von 1,8° im Teleskop erscheint.
Die Motorwelle macht für einen Sterntag 288000
Schritte. Für 1 Umdrehung des Telekops ausgedrückt im Winkelmaß bedeutet dies:
1296000" : 288000 Schritte = 4,5" pro Vollschritt oder 2,5" pro Halbschritt
Das ist der Schrittwinkel am Teleskop.
Mikroschritt-Betrieb
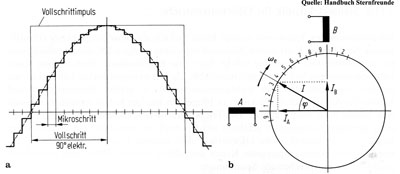 Im Vollschritt- oder Halbschritt-Betrieb werden die Ströme in den
um 90° versetzten Wicklungen A und B des Schrittmotors nach festgelegten Mustern ein- und
ausgeschaltet. Bei jedem Schaltvorgang dreht sich der Motor
schlagartig, mit einem Go und Stop um
seinen Schrittwinkel von 1,8° weiter.
Im Vollschritt- oder Halbschritt-Betrieb werden die Ströme in den
um 90° versetzten Wicklungen A und B des Schrittmotors nach festgelegten Mustern ein- und
ausgeschaltet. Bei jedem Schaltvorgang dreht sich der Motor
schlagartig, mit einem Go und Stop um
seinen Schrittwinkel von 1,8° weiter.
Beim Mikroschritt-Betrieb
werden die Ströme nicht ein- und ausgeschaltet, sondern
ändern sich kontinuierlich mit dem Winkel des Drehfeldvektors I und den daraus resultierenden Sinus- und Cosinus-Komponenten .
Jeder
Schritt wird zusätzlich in 64 Mikroschritte treppenförmig
unterteilt und somit einem Sinusverlauf angenähert. Man ereicht
damit einen
sanften, gleichmäßigen Lauf ohne Resonanzerscheinungen. Der
Schrittwinkel am Teleskops verringert sich dabei auf 4,5" : 64 = 0.07"
und liegt damit unterhalb des Standard-Seeings von ca. 2".
Die oben beschriebenen Maßnahmen reichen für eine visuelle
Beobachtung vollkommen aus:
1. Polblock der parallaktischen Montierung auf die Polhöhe des Beobachtungsortes einstellen
2. Stundenachse mit einem Polsucher auf die aktuelle Stellung des Polarsternes einstellen
3. Motorische Nachführung auf Sterngeschwindigkeit einstellen
4. Mikroschritt-Steuerung gewährleistet hohe Laufruhe ohne Resonanzerscheinungen

Für die Langzeit-Fotografie >1min. müssen, trotz des
bereits recht hohen Aufwandes, weitere Maßnahmen getroffen werden.
Die sonst runden Sternabbildungen würden zu kleinen Strichen auseinandergezogen werden.
Der Grund hierfür liegt in den Fertigungstoleranzen und im
mechanischen Spiel der handelsüblichen, bezahlbaren
Schneckenrad-Getriebe. Kleinste Unregelmäßigkeiten lassen
die Nachführgeschwindigkeit minimal schwanken.
Ein Stern
pendelt mit motorisierter, aber unkontrollierter Nachführung im Okular langsam hin und her.
Dieser wiederkehrende Fehler heißt Pendelfehler oder "Periodischer Schneckenfehler", da er nach jeder Schnecken-Umdrehung erneut auftritt.
Abhilfe schafft hier das sog.
"Autoguiding", d.h. eine genaue Kontrolle und Korrektur der motorischen Nachführung
während einer Langzeitbelichtung.
siehe Kapitel "Automatische Nachführung"